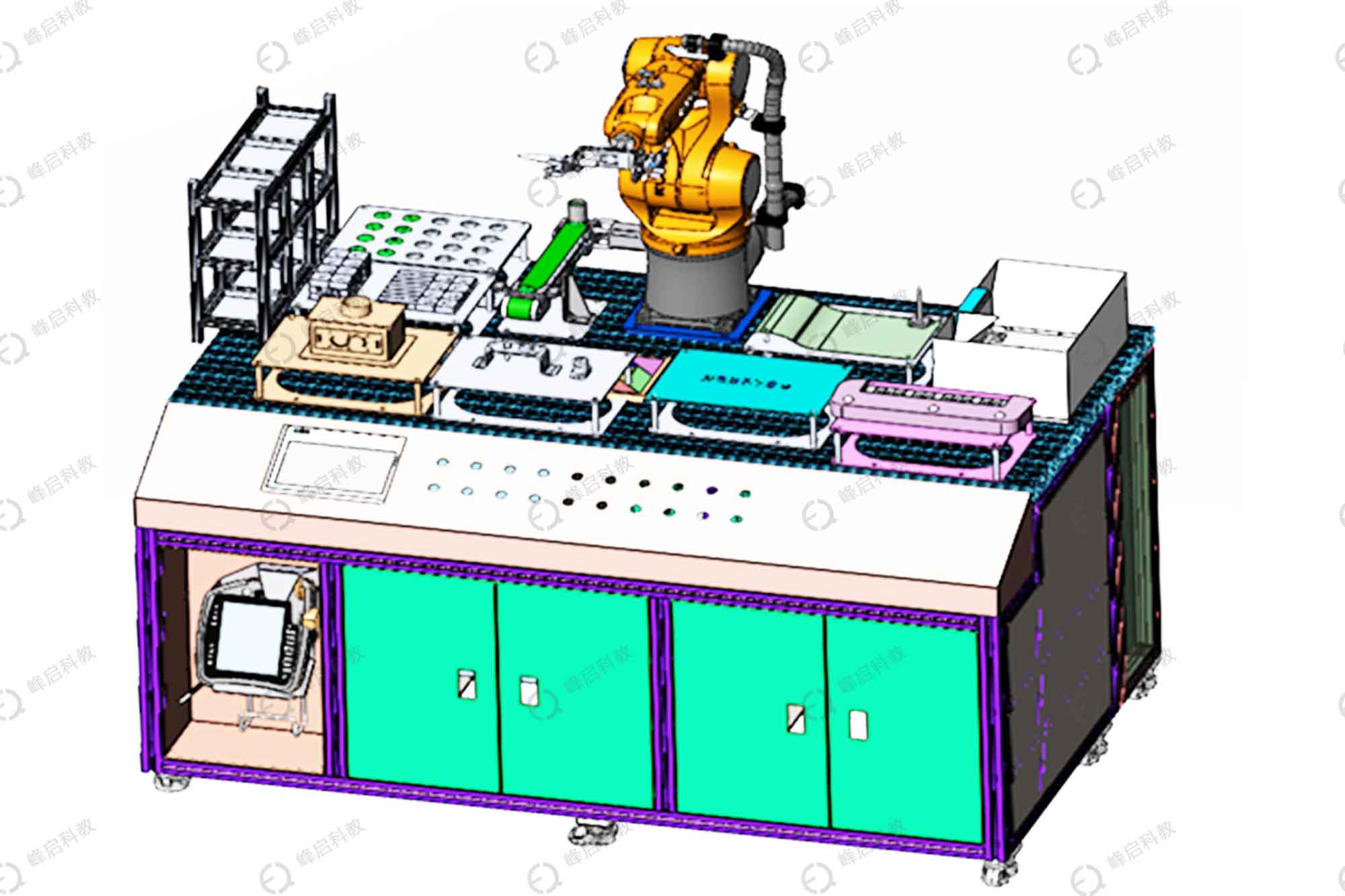
1 | 多功能工作站1 | ABB机器人
1.工作半径:≥900mm;
2.机器人自由度:6自由度;
3.负载:≥6kg;
4.重复定位精度:≤0.03mm;
机器人手爪
1.材质:铝件 表面氧化定制化加工
2.主要功能:安装与工业机器人第6轴前端,配置了气手指、真空吸盘等执行元器件。通过吸附、抓取、旋转、偏移等方法,实现多作用夹具完成多个不同任务,如码垛、搬运、分拣、上下料模拟等多种功能。
控制系统
1.可编程控制器:1.CPU主要指标:125KB工作存储器;板载DI14x24VDC漏型/源型,DQ10x24VDC;2个以太网借口接口用于编程、触摸屏以及PLC间通信;
2.电气信号通过可编程控制器(PLC)的I/O输入系统、触摸屏和可编程控制器采用以太网通讯的方式连接;配device net 转profinet通讯模块;
3.人机界面:10寸触摸屏,串口,USB口,以太网口,人机界面产品的设计符合工业环境,触摸屏系统与可编程控制器(PLC)之间通过数据交互实现cao作设置、工艺显示、报警显示、数据实时监控等,各种自动、手动、启动、停止的等cao作。"
工作台
提供整个工作站设备安装场所
材质:采用钣金+型材的方式
尺寸:约1800*1100*9000mm(可根据设计调整尺寸)。
搬运组件
1.材质:铝件 表面氧化,工件采用尼龙材质定制化加工 2.主要功能:使用机器人进行工件的搬运摆放cao作,用来培养学生简单的搬运技能的掌握。
3.尺寸:不大于360*260*106mm。
搬运码垛组件
1.材质:铝件 表面氧化,工件采用矩形、正方形尼龙材质定制化加工
2.主要功能:使用机器人进行工件的搬运码垛cao作,用来培养学生简单的搬运码垛技能的掌握。 3.尺寸:不大于360*260*160mm,
搬运装配组件
材质:铝件 表面氧化,工件采用矩形、正方形尼龙材质
定制化加工
主要功能:使用机器人进行工件的搬运装配cao作,用来培养学生简单的搬运装配技能的掌握。 尺寸:不大于360*260*180mm。
轨迹跟踪组件
1、结构件材料不锈钢,表面为镜面处理;
2、可实现TCP 标定练习,提供TCP 标定用锥形教学块;
3、可实现基本轨迹编程练习,提供三角形、方形教学轨迹;
4、可实现复杂轨迹编程练习,提供曲线教学轨迹;
5、尺寸:不小于360*260*140mm。
6.智能相机:
接口:IEEE 802.3 1000BASE-T, IEEE 802.3af (PoE);
分辨率:2592 (H) × 1944 (V);
传感器:ON Semi MT9P031 / MT9P006;
传感器类型:CMOS;
传感器尺寸:Type 1/2.5;
像元尺寸:2.2 μm × 2.2 μm;
标准镜头接口:C-Mount;
zui大满帧帧率:14 fps;
ADC:12 Bit;
缓存 (RAM):64 MByte;
成像性能:
暗噪声:7.5 eˉ;
饱和电子数:6000 eˉ;
动态范围:57.6 dB;
绝·对灵敏度阈值:8.0 eˉ;
输出:
Bit位数:8/12 Bit;
黑白像素格式:Mono8, Mono12, Mono12Packed;
YUV彩色像素格式:YUV411Packed, YUV422Packed, YUV444Packed;
RGB彩色像素格式:RGB8Packed, BGR8Packed;
通用输入输出口:
光耦 I/Os:1 input, 3 outputs;
工作条件/尺寸:
工作温度:+5 °C to +45 °C housing temperature;
电源要求 (DC):12 to 24 VDC AUX or 802.3at Type 1 PoE;
功耗:2.0 W at 12 VDC; 2.2 W PoE。 |